 Professor
ProfessorStructure and morphology of metals are designed by metallurgical methods to develop new metals for medicine with high biocompatibility and excellent biological function.
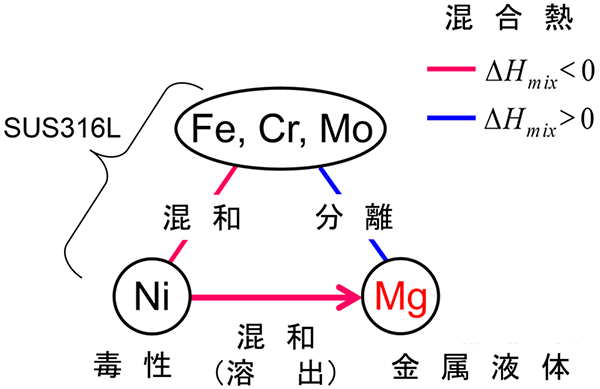
Dealloying reaction design to remove toxic Ni element from SUS316L surface
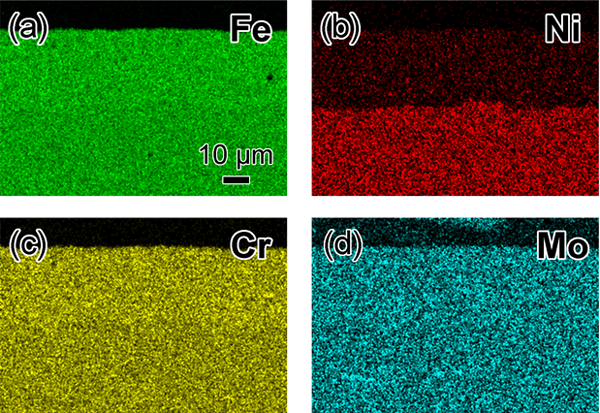
EDS results on cross section of SUS316L surface in which toxic Ni element has been selectively removed in a Mg liquid
 Professor
ProfessorOur research group focuses on revolutionizing metallic biomaterials, particularly biomedical Co-Cr alloys and titanium alloys for orthopedic and dental applications, via advanced processing. With a strong emphasis on metal additive manufacturing and thermomechanical processing, we explore the microstructural evolution and its impact on relevant properties, such as mechanical properties, corrosion resistance, and biocompatibility, to develop novel processing strategies and clarify the underlying mechanisms. Our research interests include advanced characterization via synchrotron X-ray and neutron diffraction and simulation-aided alloy design.




