 Professor
ProfessorWe are conducting a study on the analysis, evaluation, and modeling of biological systems using methods that integrate biological sensing, artificial intelligence, and system control. We aim to propose theories about cyber–physical systems in medicine, health, and welfare and develop advanced techniques for social implementation.

Mirror type device for non-contact measurement of biological signal

Virtual cycling wheelchair
 Professor
ProfessorTo derive clinically useful information and findings from biomedical signal and images, we aim at studying and developing new methods and theories of computational intelligence including AI and machine learning technologies and implementing them as intelligent medical systems to advance the clinical diagnosis and treatment further. For example, we are developing intelligent systems that automatically detect lesions latently captured in the medical diagnosis images and classify them based on more clear explanations associated with medical evidence and practices in specialists’ diagnoses. The mathematical and computational methods to accurately track and predict the time-varying location and shape of tumors obscurely captured in X-ray images is another research topic for achieving more accurate radiation therapy. Also, we are actively advancing research collaboration with companies in the field of medical systems and making contributions to our society by releasing our developed technologies.
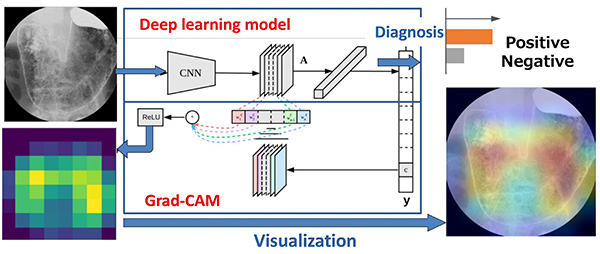
Explainable deep learning-based computer-aided system for H. Pylori infection diagnosis using gastric X-ray images.
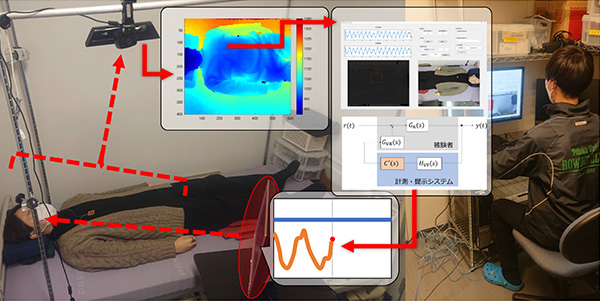
Comfortable bio-feedback control system with body surface measurement for stable respiration induced tumor motion during radiotherapy.



