Professor
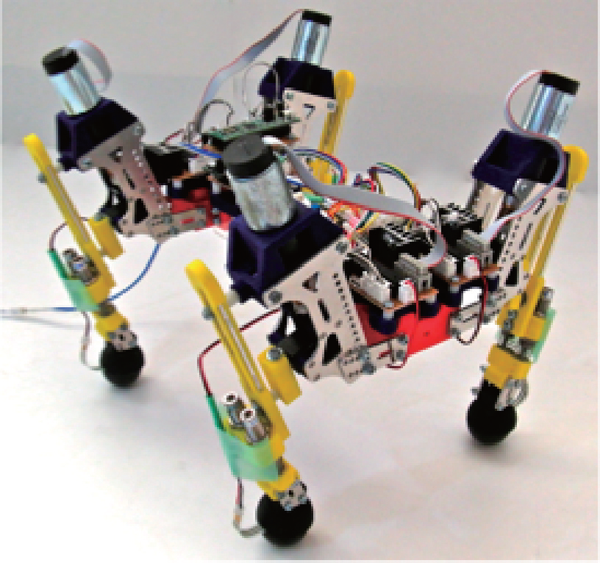
ProfessorLiving organisms exhibit surprisingly adaptive and versatile behavior in real time under unpredictable and unstructured real world constraints. Such behaviors are achieved via spatiotemporal coordination of a significantly large number of bodily degrees of freedom. Clarifying these remarkable abilities enable us to understand life-like complex adaptive systems as well as to construct truly intelligent artificial systems. We study the design principle of autonomous decentralized systems that exhibit life-like resilient behaviors from the viewpoints of robotics, mathematics, nonlinear science, and physics.
 Professor
ProfessorFor realizing good communication with human body, and for realizing the properties of the human body as a information system, we have to realize the function of the human body as information. We are working on the technology for sensing the information from the human body and for approaching action to the human body. High-frequency carrier-type magnetic field sensor is studied for sensing system for bio-information. As one of the approaching system for human body, wireless actuators and manipulators are investigated. A part of this technology is applied for a motion system for a capsule endoscope working in the colon tube.
 Professor
ProfessorThis group is developing novel nano-biomedical devices through the reconstitution of biological functions on small chips based on the combination of nanotechnology and biological materials. Attention is mainly focused on construction of artificial cell membranes and artificial neuronal networks, and their application to medical devices. This research field is a fusion of various fields, including nanotechnology, nano-structures, semiconductor devices and biological sciences.
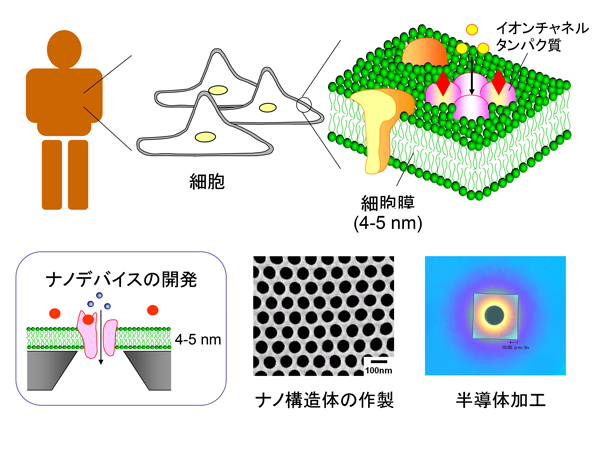
An artificial device that mimics biological cell membranes
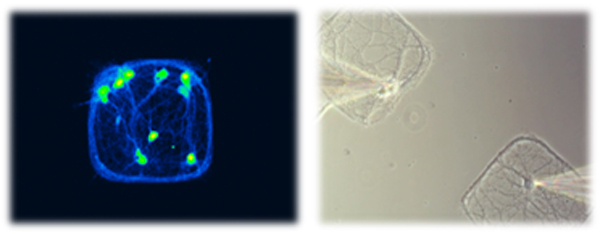
Reconstruction of neuronal circuits using living cells