教授 石川 拓司
教授 石川 拓司  准教授 菊地 謙次
准教授 菊地 謙次  准教授 大森 俊宏
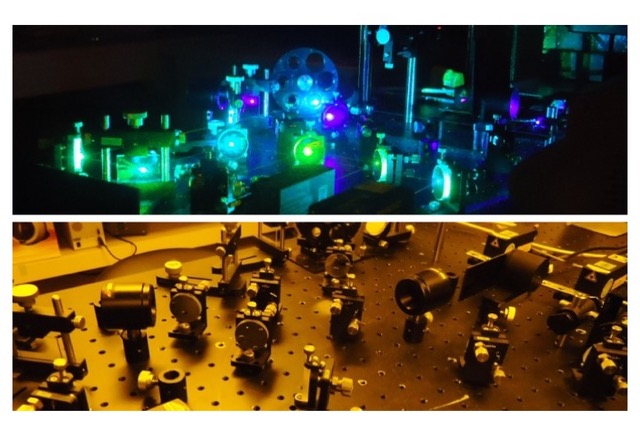
准教授 大森 俊宏 バイオメカニクスは,生体内における各種の生理学的あるいは病理学的な現象を物理法則に基づいて調べ,生物学・医学と異なる視点から生命現象を解明する学問分野である。私達は,臓器や組織,細胞を主な研究対象とし,バイオメカニクスの視点から健康や環境に関わる様々な生命現象を研究している。研究対象は多岐に渡り,微生物懸濁液の大規模GPUコンピューティング,呼吸器・消化器系のバイオイメージングと各種疾患メカニズムの解明,人体内や複雑環境内を推進するマイクロスイマーの開発などを行っている。
 教授 田中 徹
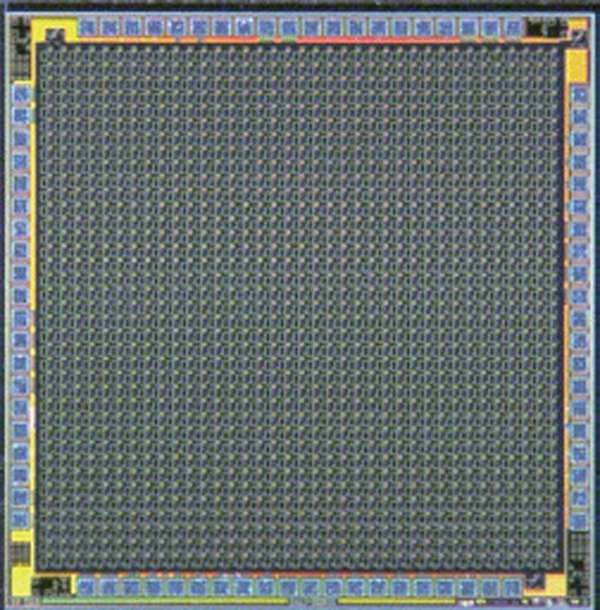
教授 田中 徹 半導体神経工学は生体の神経システムへ半導体工学を駆使して迫り,その構造と機能の探究を通して,生体と機械を綜合した新しい融合システムを創成する研究領域である。本研究室では半導体神経工学とそれに基づく生体融和型の新しいマイクロ・ナノ集積システムについての教育と研究を行う。生体と同じ三次元積層構造を有する人工網膜や,神経活動や生体信号を利用するヘルステックデバイスについて研究を行っている。また,三次元半導体集積回路(3D-IC)技術やAI半導体チップ設計の研究も行っている。
 教授 神崎 展
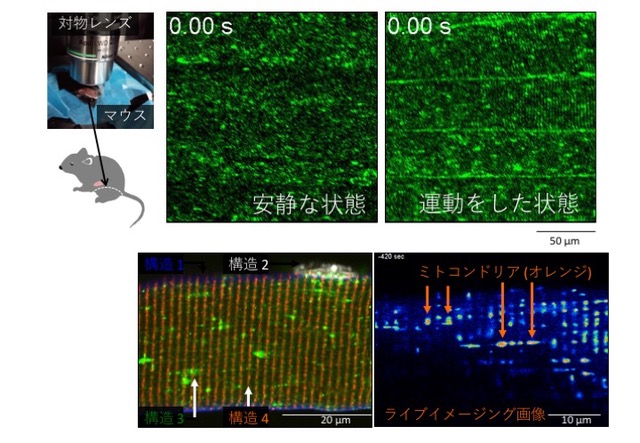
教授 神崎 展 2型糖尿病を含めたさまざま生活習慣病を罹患する人が激増している。神崎研究室では最先端ナノイメージング技術を使って生命機能を可視化解析しながら,それらの疾患の分子病態機序について「ナノシステムの障害」という新しい観点から研究を推進している。また,最新の細胞工学・遺伝子工学技術を駆使して高度発達型細胞を創製している。
 教授 西澤 松彦
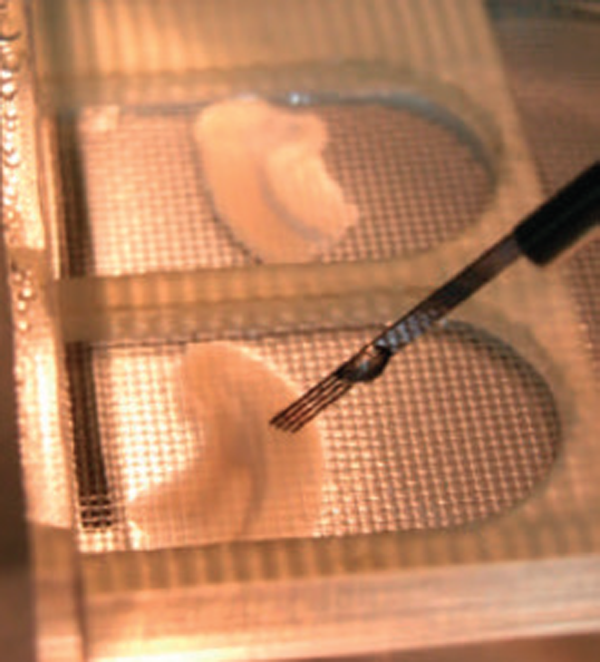
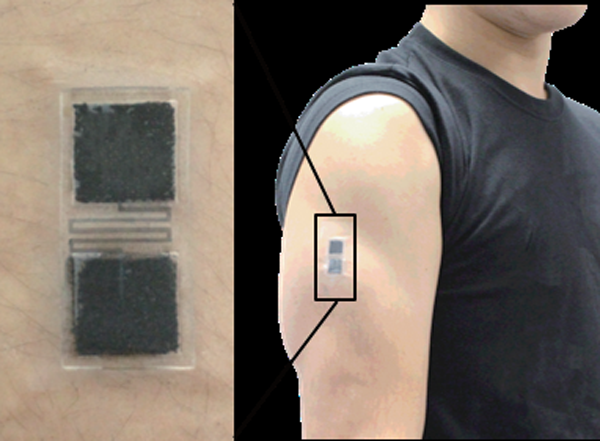
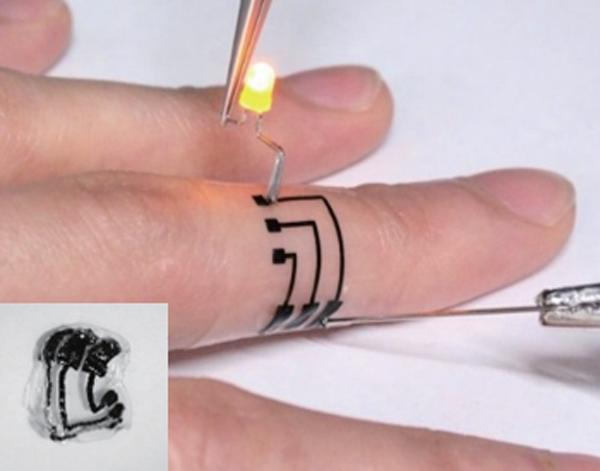
教授 西澤 松彦 生体・環境親和性に優れるバイオ融合型デバイス・システムの開発を行っている。特に,ウェットな生理環境中で行うソフトマテリアルの加工技術を開拓し,脆弱なバイオ素材(タンパク質・ゲル・細胞など)を取り込むデバイス製造を可能とすることによって,バイオ機能を最大限に活かして動作する安全・高感度・高効率な自律駆動デバイスを創出する。
 教授 林部 充宏
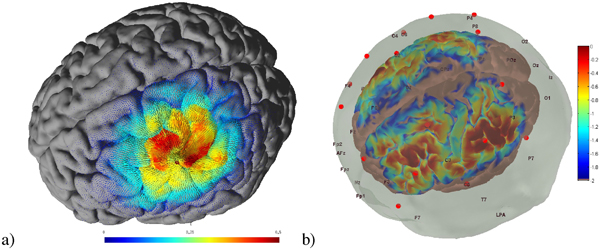
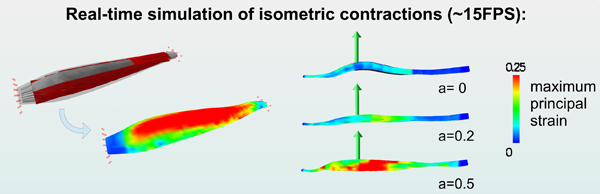
教授 林部 充宏 ロボットの世紀などと近年言われるが,実世界の環境との適応的インタラクションという側面ではまだまだ人間のもつ高度な運動制御,感覚機能から学ぶべきことは多い。本研究室では人間の持つ環境適応,運動学習能力を工学的にも脳科学的にも深く理解するため,情報処理およびロボティクスのモデル化技術をベースとして用い脳科学的にも説明が可能なレベルで人間の運動制御,学習メカニズムの解明とそれに資する人間の運動情報の収集およびロボティクスツールを用いた解析に関する技術開発を行う。ロボティクスのためのニューロサイエンス,ニューロサイエンスのためのロボティクスと双方向的に科学するニューロロボティクスに取り組む。また運動学習と脳の環境知覚の研究から得た知見から,運動学習効果を最大限に引き出すニューロリハビリテーションを目指す。