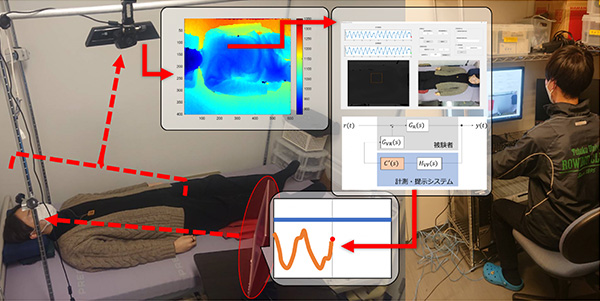
教授 杉田 典大
教授 杉田 典大 本分野では,サイバネティクス,情報・通信工学,システム制御工学等を駆使することによって,生体を正確にかつ低負荷で観測・計測するための技術を開発すると共に,得られる生体情報に基づく機能の解明や生体シミュレーションなどを実現するための研究を行う。さらに,これらの技術を応用したサイバー医療システムや先進的ヒューマンインターフェースの開発を行う。これらの研究・開発を通じて,医学・工学・情報学の知識を有機的に扱える人材の育成を目指す。

鏡型生体信号計測デバイス

バーチャル足こぎ車いすシステム
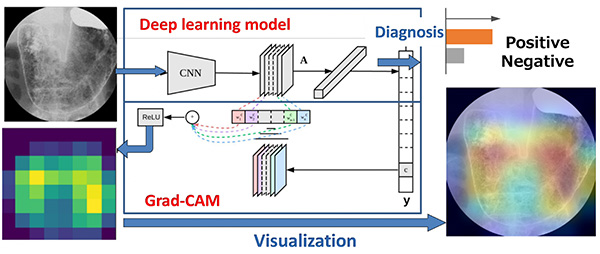
 教授 本間 経康
教授 本間 経康 生体情報の可視化や知的解析と,それを基にした脳機能の数理モデル化と知的解析法への還元がもたらす相乗効果により,医療・生命科学から理工学的な応用まで分野横断的な医工学システムに関する教育・研究を行う。とくに,臨床的需要に即した診断ならびに治療システムの知能化技術の開発を行うことで,医療従事者の働き方改革を支援し,高齢化や医師偏在問題を解決して持続可能な健康長寿社会を実現する人材を育成する。