教授 石黒 章夫
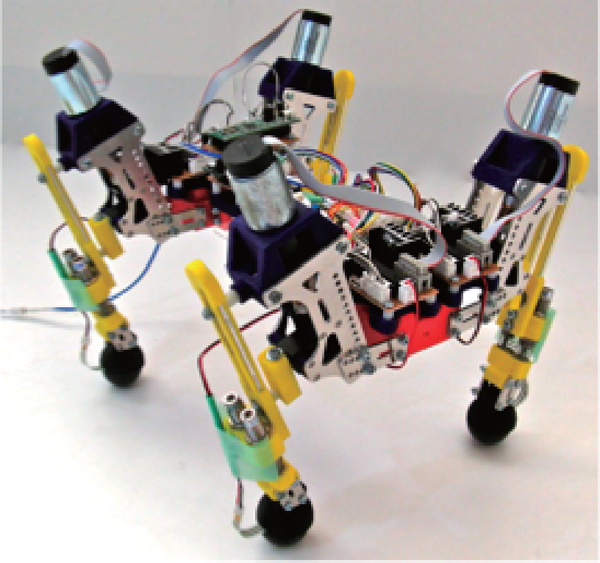
教授 石黒 章夫 生物は,自身の身体に持つ膨大な自由度を巧みに操り,実世界環境に対してしなやかかつタフに適応可能である。本研究室では,ロボティクスや数理科学,生物学,物理学といったさまざまな学問領域を縦横無尽に行き来しながら,「ハードでドライ」なシステムを基盤とする既存技術では決してなし得ない,生物のような「しぶとさ」や「したたかさ」,「打たれ強さ」,「多芸多才さ」といった知を有する,「ソフトでウェット,コンティニュアム」な知的人工物システムの創成を目指した研究を進めている。
 教授 石山 和志
教授 石山 和志 生体との電磁コミュニケーションを確立し,生体のもつ情報システムとしてのはたらきを理解するためには,生体の有するさまざまな機能性を情報として捉え,それらを総合的に解明することが必要である。本研究分野は,生体の発する情報を受け取るセンシング技術ならびに生体に働きかけを行う技術に関する研究を推進しており,極めて高い磁界分解能を有する高周波キャリア型磁界センサや,ワイヤレスアクチュエータ・マニピュレーターに関する研究開発を行っている。これらの成果の一部は,カプセル内視鏡の駆動機構等への応用が進められている。
 教授 平野 愛弓
教授 平野 愛弓 ナノテクノロジーとバイオ材料を融合し,生体機能を小さなチップ上に再構成することにより,新しい医用・創薬用デバイスや生体機能解析プラットフォームの創成を目指す。特に,神経細胞やその細胞膜,さらには細胞膜中の膜タンパク質(イオンチャネル)のような様々な階層のバイオ材料を対象に,人工細胞膜や人工神経回路網の構築とそのメディカル応用について研究する。本分野は,ナノ構造体や半導体デバイスから生物科学に至る研究分野の融合であり,学際領域にまたがる広範な知識と研究能力とを兼ね備えた人材を育成する。
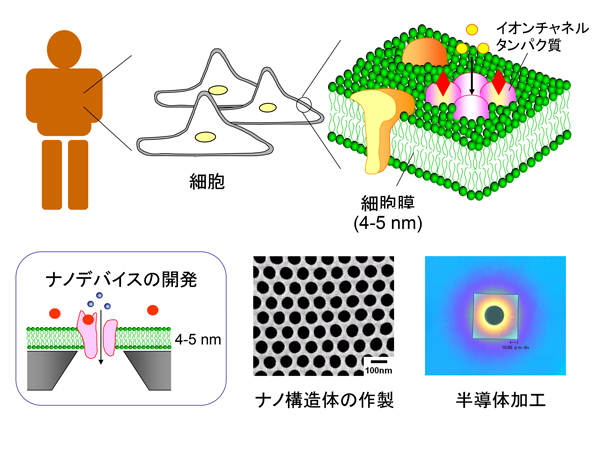
体の中の膜構造に倣った人工細胞膜デバイス
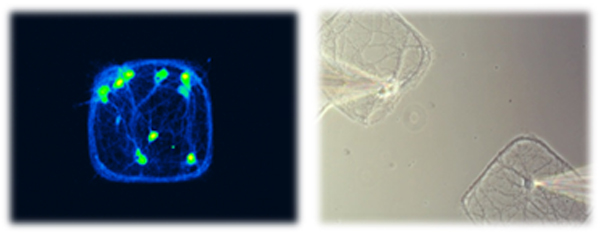
生きた細胞を用いた神経回路の再構成